Chapitre 13 : Décrire un mouvement 🚀⚓︎
▶️ Capsule : Le cours complet
▶️ Capsule : Le cours complet 2
🌍 I. Référentiel et repères⚓︎
🧠 A savoir
Pour simplifier l'étude du mouvement d'un système, on le réduit à un point matériel, souvent noté M.
Pour décrire le mouvement d'un système, il faut connaitre deux informations :
-
sa trajectoire : elle nous informe sur la position (les coordonnées) de l'objet au cours du temps
-
sa vitesse : elle nous informe sur la rapidité avec laquelle l'objet se déplace
On ne peut définir un mouvement que par rapport à un objet de référence : le référentiel.
Il existe des référentiels particuliers et « pratiques » :
-
🌏 Le référentiel terrestre : constitué par un repère fixé à la surface de la Terre (ou fixe par rapport à la Terre) et utilisé pour étudier le mouvement d'un objet sur la Terre ou au voisinage de celle-ci.
-
🌐 Le référentiel géocentrique : constitué par un repère fixé au centre que la Terre mais ne tournant pas sur lui-même comme la Terre. Il est utilisé pour étudier le mouvement de la Lune ou des satellites.
-
☀️ Le référentiel héliocentrique : constitué par un repère fixé au centre du Soleil. Il est utilisé pour étudier le mouvement des planètes.
Un référentiel est toujours associé à un repère d'espace (repère \((O,\ \overrightarrow{i},\overrightarrow{j},\overrightarrow{k})\) orthonormé) et un repère de temps (chronomètre).
📍 II. Le vecteur position⚓︎
🧠 A savoir
Pour étudier le mouvement d'un point M dans un référentiel, on définit :
-
un repère d'espace orthonormé \((O,\ \overrightarrow{i},\overrightarrow{j},\overrightarrow{k})\).
-
un repère de temps : le temps est compté à partir d'une origine à laquelle t = t0 = 0 s.
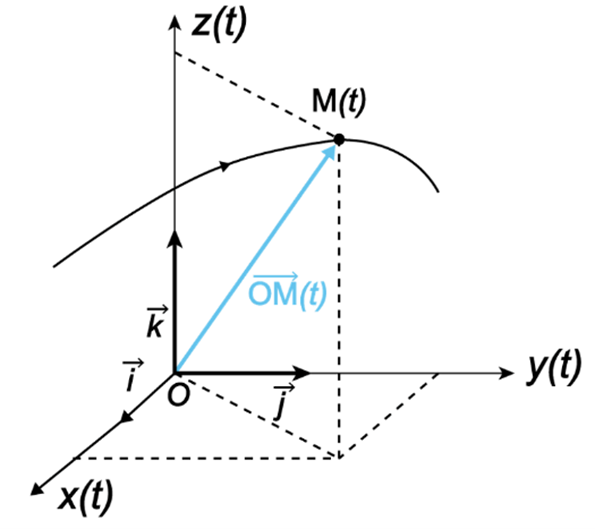
La position du solide est alors donnée par son vecteur position \(\overrightarrow{OM}\) à un instant t :
La norme du vecteur position est :
Dans de nombreux cas on se limite à des mouvements plan en deux dimensions on a alors \(z(t) = 0.\)
🏃 III. Le vecteur vitesse⚓︎
🧠 A savoir
Le vecteur vitesse \(\overrightarrow{v}\) caractérise la variation du vecteur position \(\overrightarrow{OM}\) en fonction du temps :
Le vecteur vitesse moyenne est défini à un instant ti par :
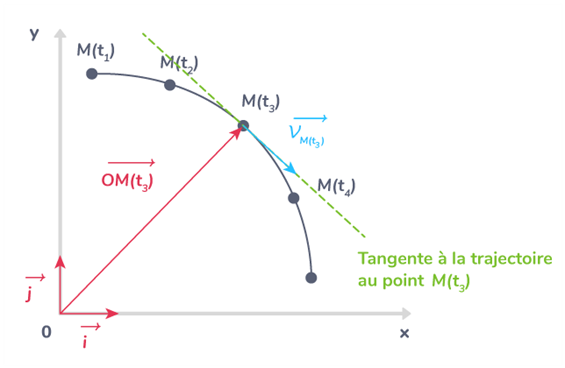
Le vecteur vitesse d'un point mobile à un instant t est caractérisé par :
-
Sa direction : la tangente à la trajectoire au point considéré
-
Son sens : celui du mouvement à l'instant ti
-
Sa valeur : \(\frac{M_{i}M_{i + 1}}{\Delta t}\) qui s'exprime en mètre par seconde (m.s–1).
La vitesse instantanée est la dérivée du vecteur position par rapport au temps :
Les coordonnées du vecteur vitesse instantanée \(\overrightarrow{v}(t)\) sont :
La norme (valeur) de la vitesse instantanée est :
▶️ Capsule : Tracer un vecteur vitesse
⚡ IV. Le vecteur accélération⚓︎
🧠 A savoir
Le vecteur accélération caractérise les variations du vecteur vitesse \(\overrightarrow{v}\) en fonction du temps. Le vecteur accélération moyenne \({\overrightarrow{a}}_{moy}\left( t_{i} \right)\) à un instant ti est défini par :
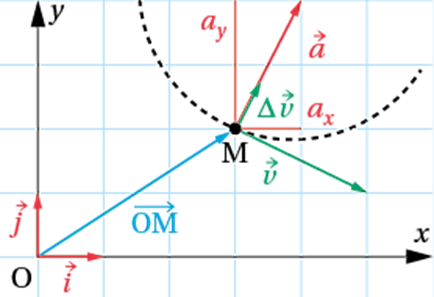
Le vecteur accélération \({\overrightarrow{a}}_{moy}\left( t_{i} \right)\) d'un point mobile à un instant t est caractérisée par :
-
Sa direction : identique à celle du vecteur \(\Delta\overrightarrow{v}(t_{i})\) au point considéré
-
Son sens : identique à celui du vecteur \(\Delta\overrightarrow{v}(t_{i})\) à l'instant ti
-
Sa valeur : \(\frac{\Delta v}{\Delta t}\) qui s'exprime en m.s–2.
L' accélération instantanée est la dérivée du vecteur vitesse par rapport au temps :
Les coordonnées du vecteur accélération instantanée \(\overrightarrow{a}(t)\) sont :
La norme (valeur) de l'accélération instantanée est :
Le vecteur accélération est colinéaire et de même sens que le vecteur variation de vitesse déjà vu en première.
Rappel de première 🔙
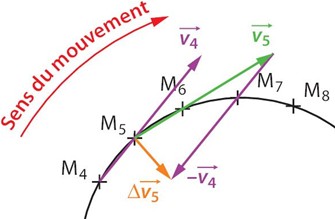
Sur l'enregistrement de la trajectoire ci-dessous, le vecteur variation de vitesse \(\overrightarrow{\Delta v_{5}} = \overrightarrow{\Delta v_{4 \rightarrow 5}}\) :
-
se construit comme la différence vectorielle \(\overrightarrow{v_{5}} - \ \overrightarrow{v_{4}}\)
-
a pour origine le point M5
-
est colinéaire et de même sens que la somme des forces appliquées au système \(\Sigma\overrightarrow{F} = m \times \frac{\Delta\overrightarrow{v}}{\Delta t}\)
▶️ Capsule : Position, vitesse et accélération exemple 1
▶️ Capsule : Position, vitesse et accélération exemple 2
🔀 V. Les différents types de mouvement⚓︎
🧠 A savoir
➡️ 1) Le mouvement rectiligne⚓︎
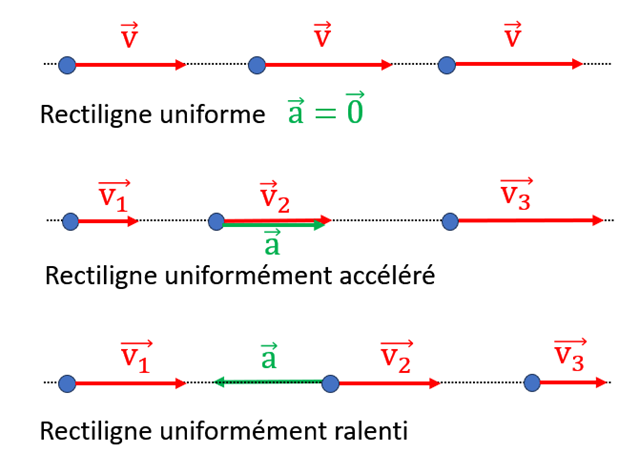
Un mouvement est rectiligne si la trajectoire du système est une droite.
Dans ce cas, les vecteurs vitesse \(\overrightarrow{v}\) et accélération \(\overrightarrow{a}\) gardent la même direction, celle de la trajectoire.
-
Si \(\overrightarrow{a} = \overrightarrow{0}\) : Le vecteur vitesse est constant et le mouvement est rectiligne uniforme. 🟰
-
Si \(\overrightarrow{a}\) et \(\overrightarrow{v}\) sont de même sens : La norme du vecteur vitesse augmente, son sens et sa direction restent les mêmes ; le mouvement est rectiligne uniformément accéléré. ⏩
-
Si \(\overrightarrow{a}\) et \(\overrightarrow{v}\) sont de sens opposés : La norme du vecteur vitesse diminue, son sens et sa direction restent les mêmes ; le mouvement est rectiligne uniformément ralenti. ⏪
▶️ Capsule : Mouvement rectiligne et accélération
🔄 2) Le mouvement circulaire⚓︎
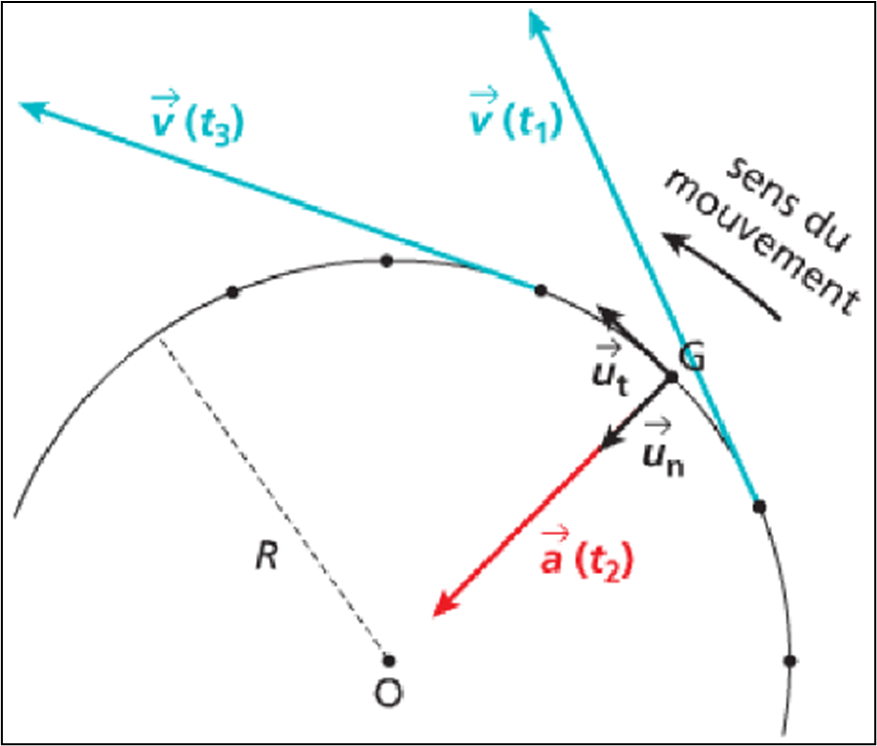
Un mouvement est circulaire si la trajectoire étudiée est représentée par un cercle (ou un arc de cercle). Dans ce cas, le vecteur vitesse \(\overrightarrow{v}\) est toujours tangent à la trajectoire et dans le sens du mouvement.
Mouvement circulaire uniforme 🟰🔄
-
Si la valeur de la vitesse est constante (v = cste), la norme du vecteur vitesse reste constante : le mouvement est circulaire uniforme.
-
Le vecteur vitesse \(\overrightarrow{v}\) reste tangent à la trajectoire et le vecteur accélération \(\overrightarrow{a}\) est dirigée selon un rayon du cercle
-
Les vecteurs vitesse \(\overrightarrow{v}\) et accélération \(\overrightarrow{a}\) sont perpendiculaires.
-
Aucun des deux vecteurs n'est constant : leur direction varie continuellement.
Mouvement circulaire non uniforme 🔄📈📉
- Si la valeur v de la vitesse varie, la norme du vecteur vitesse varie.
Le vecteur vitesse \(\overrightarrow{v}\) reste tangent à la trajectoire et le vecteur accélération \(\overrightarrow{a}\) est toujours dirigé vers l'intérieur de la trajectoire.
Les vecteurs vitesse \(\overrightarrow{v}\) et accélération \(\overrightarrow{a}\) sont quelconques et varient au cours du temps.
On peut alors distinguer deux cas :
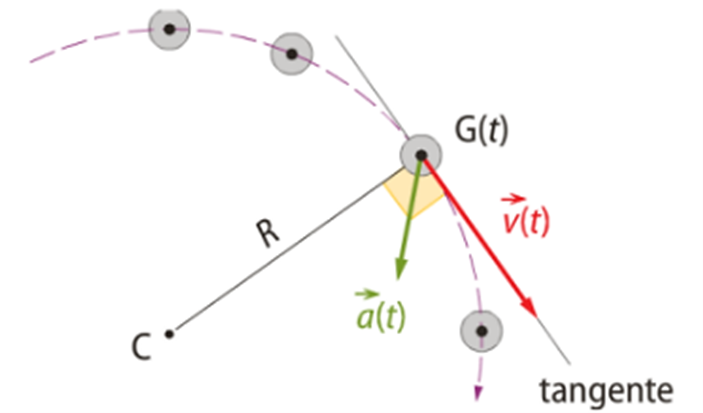
Si la valeur de la vitesse augmente : le mouvement est accéléré. Les vecteurs \(\overrightarrow{v}\) et \(\overrightarrow{a}\) forment un angle plus petit que 90°.
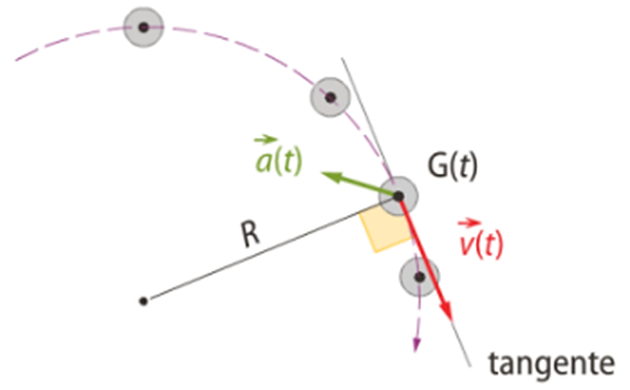
Si la valeur de la vitesse diminue : le mouvement est ralenti. Les vecteurs \(\overrightarrow{v}\) et \(\overrightarrow{a}\) forment un angle plus grand que 90°.